
船舶360°防避碰系统
项目目标
通过船一周的6个摄像头,拍摄船体一周实时环境的画面,叠加毫米波雷达、通导数据,使本船直观掌控船舶离岸距离及周边环境,更好地操控船舶,实现安全靠泊。
通过远距离的180°摄像头,结合X波段雷达信号、AIS信号和通导信息,实现本船对船舶360°全方位周边环境的掌控,并对周边船舶的身份、航行信息做到准确掌控,做到提前规避,避免碰撞。
技术路径
1.辅助靠泊
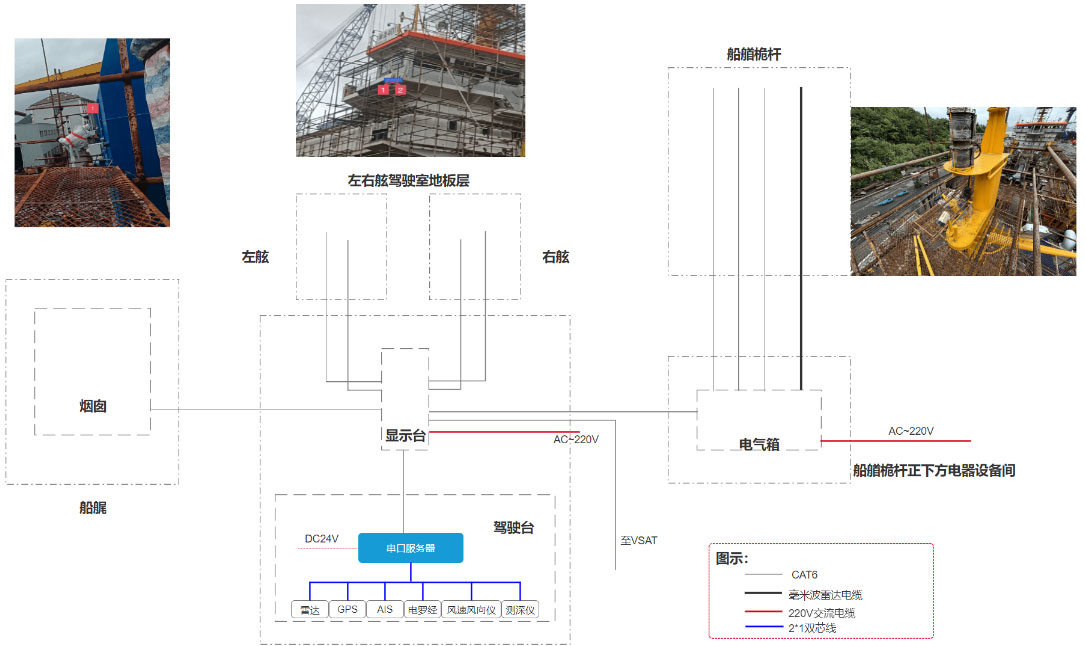
利用两舷左右各两台、船艏一台、船艉一台共计6台摄像头,采集船舶一周环境的实时画面,通过视频融合技术,将6个画面融合成一个整体视频画面,同时利用船舶两舷的毫米波雷达,实时探测两舷与泊位的距离,在距离到达一定范围内时,提供声音报警;并融合通导数据,实现对船舶吃水、水深、対地速度等信息的全方位掌控,帮助船舶安全、稳定的靠泊。
2.防避碰
通过船艏225°云台全景摄像头,实现对船体某个方位225°环境实时查看;通过云台,实现对船体360°方位的周边环境的查看,并结合X波段雷达、AIS数据,实现对画面中船舶的身份信息、距离方位、航速航向等信息的获取,帮助本船掌握周边船舶动向;同时,通过将雷达信号接入红外热成像热像头,实现安全距离内的自动报警提醒功能,保证船舶航行安全。
实船布线图
实船安装图

实船安装图
辅助靠泊效果图 防避碰效果图 前方广角图 | 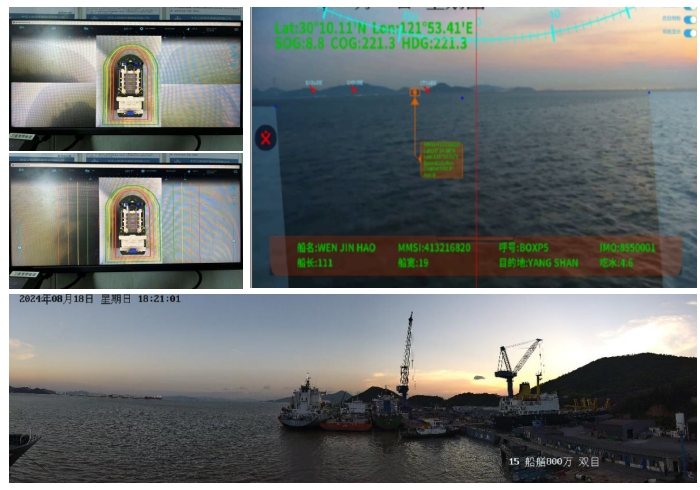 |